




သံလိုက်ဝက်ဝံများ၏ အလုပ်လုပ်ပုံနိယာမနှင့် အမျိုးအစားခွဲခြားခြင်း
သံလိုက်ဝင်ရိုးစနစ်များကို ၎င်းတို့၏ အလုပ်လုပ်ပုံအခြေခံမူများအရ အမျိုးအစားသုံးမျိုးခွဲခြားနိုင်သည်- Active Magnetic Bearing၊ Passive Magnetic Bearing နှင့် Hybrid Magnetic Bearing။
တက်ကြွသော သံလိုက် ဘက်ရင်
တက်ကြွသောသံလိုက်ဝက်ဝံများသည် ထိန်းချုပ်နိုင်သောလျှပ်စစ်သံလိုက်အားကို အသုံးပြု၍ လည်ပတ်နေသောရိုးတံကို မြှောက်တင်ပြီး အဓိကအားဖြင့် ရိုတာ၊ ဆိုလီနွိုက်များ၊ အာရုံခံကိရိယာများ၊ ထိန်းချုပ်ကိရိယာများနှင့် ပါဝါချဲ့စက်များဖြင့် ဖွဲ့စည်းထားသည်။ ဆိုလီနွိုက်များကို ရေဒီယယ်ဆီယမ်ဆ៊ီမက်ထရစ်ဖြင့် ထားရှိထားသော လျှပ်စစ်သံလိုက်များမှ ထုတ်လုပ်သော သံလိုက်စက်ကွင်းတွင် ဆိုင်းငံ့ထားသော စတာတာပေါ်တွင် တပ်ဆင်ထားပြီး တစ်ခုချင်းစီတွင် ရိုးတံ၏အနေအထားပြောင်းလဲမှုများကို အဆက်မပြတ်စောင့်ကြည့်ရန် အာရုံခံကိရိယာတစ်ခု သို့မဟုတ် တစ်ခုထက်ပို၍ တပ်ဆင်ထားသည်။ အီလက်ထရွန်းနစ်ထိန်းချုပ်မှုစနစ်၏အကူအညီဖြင့် အာရုံခံကိရိယာမှထွက်ရှိသော အချက်ပြမှုသည် လျှပ်စစ်သံလိုက်မှတစ်ဆင့် လျှပ်စီးကြောင်းကို ပြုပြင်ပေးပြီး လျှပ်စစ်သံလိုက်၏ဆွဲငင်အားကို ထိန်းချုပ်ပေးသောကြောင့် လည်ပတ်နေသောရိုးတံသည် တည်ငြိမ်ပြီး ဟန်ချက်ညီသောအခြေအနေတွင် လည်ပတ်ပြီး သတ်မှတ်ထားသော တိကျမှုလိုအပ်ချက်များကို ရရှိစေသည်။
တက်ကြွသောသံလိုက်ဝက်ဝံများကို မတူညီသောထိန်းချုပ်မှုနည်းလမ်းများအရ လက်ရှိထိန်းချုပ်မှုနှင့် ဗို့အားထိန်းချုပ်မှုအဖြစ် ခွဲခြားနိုင်ပြီး၊ မတူညီသောပံ့ပိုးမှုနည်းလမ်းများအရ ရေဒီယယ်သံလိုက်ဝက်ဝံများနှင့် axial သံလိုက်ဝက်ဝံများအဖြစ် ခွဲခြားနိုင်သည်။ လက်ရှိတွင်၊ တက်ကြွသောသံလိုက်ဝက်ဝံများထဲတွင် DC ထိန်းချုပ်ထားသောသံလိုက်ဝက်ဝံသည် အသုံးအများဆုံးဖြစ်သည်။
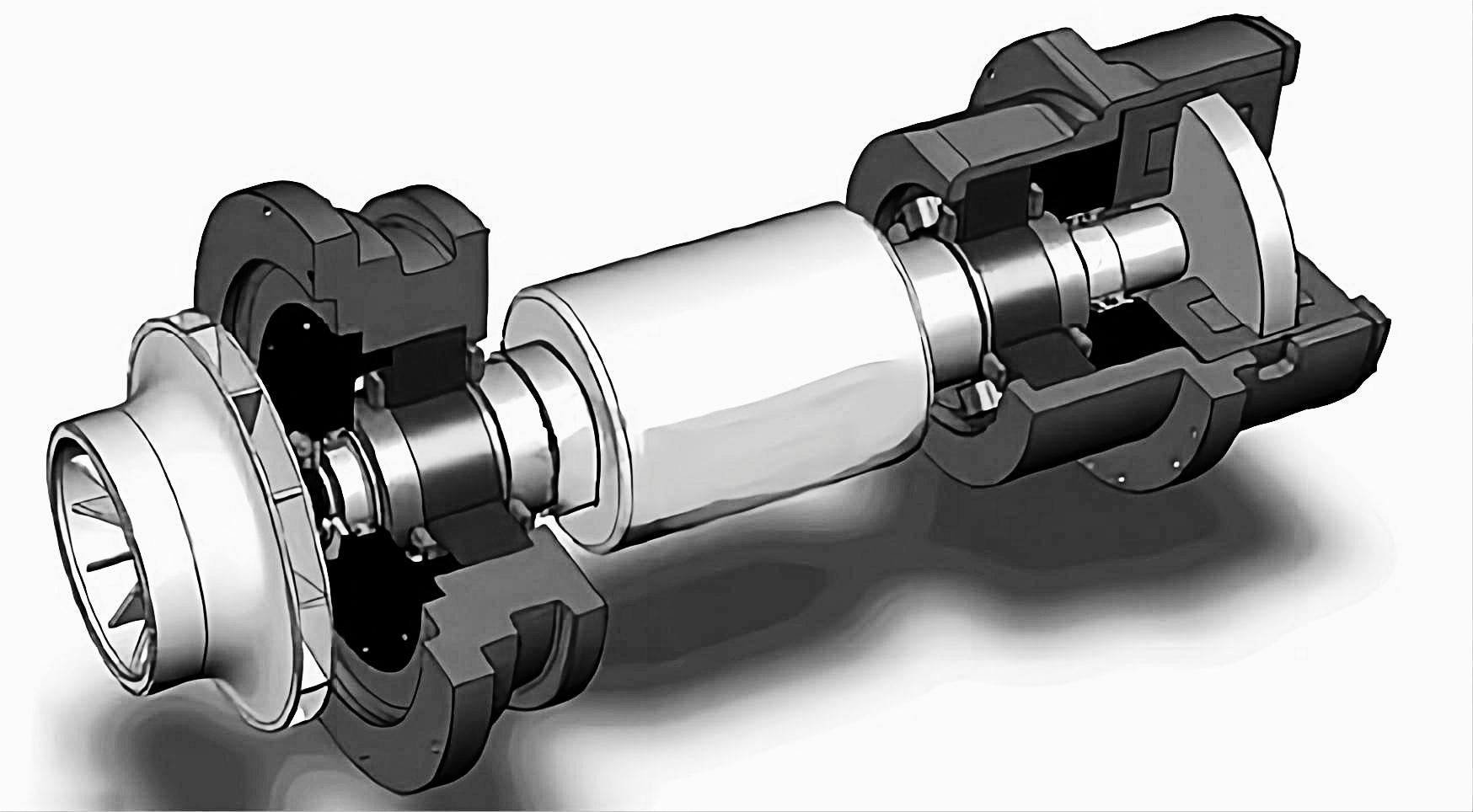
တက်ကြွသောသံလိုက်ဝင်ရိုး၏စက်ပိုင်းဆိုင်ရာအစိတ်အပိုင်းကိုယေဘုယျအားဖြင့် radial bearing နှင့် axial bearing တို့ဖြင့်ဖွဲ့စည်းထားပြီး radial bearing ကို stator (လျှပ်စစ်သံလိုက်) နှင့် rotor တို့ဖြင့်ဖွဲ့စည်းထားသည်။ Axial bearing များတွင် stator (လျှပ်စစ်သံလိုက်) နှင့် thrust plate တို့ပါဝင်သည်။
active magnetic bearing သည် rotor position ၏ အားသာချက်များရှိသောကြောင့်၊ bearing ၏ တောင့်တင်းမှုနှင့် damping ကို control system ဖြင့် ဆုံးဖြတ်နိုင်ပြီး၊ ၎င်းသည် magnetic levitation နယ်ပယ်တွင် အသုံးအများဆုံးဖြစ်ပြီး၊ active magnetic bearing ၏ သုတေသနသည် magnetic levitation နည်းပညာသုတေသန၏ အဓိကအာရုံစိုက်မှုဖြစ်ခဲ့သည်။ နှစ်ပေါင်းများစွာ ကြိုးစားအားထုတ်ပြီးနောက်၊ ၎င်း၏ ဒီဇိုင်းသီအိုရီနှင့် နည်းလမ်းများသည် ပိုမိုရင့်ကျက်လာခဲ့သည်။
တက်ကြွသော သံလိုက် ဘက်ရင်း
သံလိုက် bearing ပုံစံတစ်ခုအနေဖြင့် passive magnetic bearing တွင် ၎င်း၏ထူးခြားသော အားသာချက်များရှိပြီး အရွယ်အစားသေးငယ်ခြင်း၊ ပါဝါသုံးစွဲမှုမရှိခြင်းနှင့် တည်ဆောက်ပုံရိုးရှင်းခြင်းတို့ ရှိသည်။ passive magnetic bearing နှင့် active magnetic bearing အကြား အကြီးမားဆုံးကွာခြားချက်မှာ ယခင် bearing တွင် active electronic control system မပါရှိဘဲ သံလိုက်စက်ကွင်း၏ ဝိသေသလက္ခဏာများကို အသုံးပြု၍ လည်ပတ်နေသော shaft ကို မြှောက်တင်ခြင်းဖြစ်သည်။ လက်ရှိတွင် အသုံးအများဆုံး passive magnetic bearing များမှာ permanent magnets များဖြင့် ဖွဲ့စည်းထားသော permanent magnet bearing များဖြစ်သည်။ Permanent magnet bearing များကို အမျိုးအစားနှစ်မျိုးခွဲခြားနိုင်သည်- repulsion type နှင့် suction type။
Passive permanent magnet bearing များကို radial bearings နှင့် thrust bearings (axial bearings) နှစ်မျိုးလုံးအဖြစ် အသုံးပြုနိုင်ပြီး နှစ်မျိုးလုံးသည် suction သို့မဟုတ် repulsion ဖြစ်နိုင်သည်။ magnetic ring ၏ magnetization direction နှင့် relative position ပေါ် မူတည်၍ permanent magnet bearing များတွင် magnetic circuit structure အမျိုးမျိုးရှိသည်။ သို့သော် အခြေခံဖွဲ့စည်းပုံနှစ်ခုရှိသည်။
အခြား passive magnetic bearing အမျိုးအစားမှာ magnetized soft magnetic components များကြားတွင် လုပ်ဆောင်သော suction force ပေါ်တွင် အခြေခံသည်။ rotor component သည် radial အတိုင်း ရွေ့လျားသောအခါ suction effect သည် magnetoresistance ပြောင်းလဲမှုမှ ဖြစ်ပေါ်လာသောကြောင့် "magnetoresistive bearing" ဟုလည်း ခေါ်သည်။ ဤ bearing အမျိုးအစားကို permanent magnet အစိတ်အပိုင်း မလည်ပတ်စေရန်နှင့် soft iron အစိတ်အပိုင်းသာ လည်ပတ်စေရန် ဒီဇိုင်းထုတ်နိုင်သောကြောင့် system ပိုမိုကောင်းမွန်စွာ တည်ငြိမ်မှုရှိသည်။
reluctance bearings နှင့် active solenoid များ၏ တည်ငြိမ်စေသော အာနိသင်များ ပေါင်းစပ်မှုကြောင့် စွမ်းအင်သုံးစွဲမှု အနည်းဆုံးရှိသော magnetic bearing system ကို ဖြစ်ပေါ်စေပါသည်။
ဟိုက်ဘရစ်သံလိုက်ဘာရင်းများ
Hybrid magnetic bearing များကို active magnetic bearing များ၊ passive magnetic bearing များနှင့် အခြား auxiliary support နှင့် stabilizing structure များ - ပေါင်းစပ် magnetic bearing system တစ်မျိုးဖြစ်သည့် ပေါင်းစပ် magnetic bearing system ပေါ်တွင် အခြေခံ၍ ဖွဲ့စည်းထားသည်။ ၎င်းသည် active magnetic bearing များနှင့် passive magnetic bearing များ၏ ပြည့်စုံသော ဝိသေသလက္ခဏာများကို ထည့်သွင်းစဉ်းစားသည်။
hybrid magnetic bearing သည် electromagnet ၏ static bias magnetic field ကို အစားထိုးရန် permanent magnet မှထုတ်လုပ်သော magnetic field ကိုအသုံးပြုရန်ဖြစ်ပြီး၊ ၎င်းသည် power amplifier ၏ power consumption ကို သိသိသာသာလျှော့ချပေးရုံသာမက electromagnet ၏ ampere turns အရေအတွက်ကို ထက်ဝက်လျှော့ချပေးနိုင်ပြီး၊ magnetic bearing ၏ volume ကိုလျှော့ချပေးနိုင်ပြီး load-bearing capacity ကိုတိုးတက်စေပါသည်။
အမြဲတမ်းသံလိုက်မှ bias သံလိုက်စက်ကွင်းကို ထုတ်ပေးပြီး ထိန်းချုပ်ထားသော သံလိုက်စက်ကွင်းကို လျှပ်စစ်သံလိုက်မှ ထုတ်ပေးသောကြောင့်၊ အမြဲတမ်းသံလိုက် offset hybrid သံလိုက် bearing များတွင် အောက်ပါအားသာချက်များရှိသည်။
၁) အမြဲတမ်းသံလိုက်ကို bias static သံလိုက်စက်ကွင်းပေးရန်အသုံးပြုပြီး လျှပ်စစ်သံလိုက်သည် ဝန် သို့မဟုတ် ပြင်ပဝင်ရောက်စွက်ဖက်မှုကို ဟန်ချက်ညီစေရန်အတွက် ထိန်းချုပ်သံလိုက်စက်ကွင်းကိုသာ ပံ့ပိုးပေးသောကြောင့် စနစ်၏ bias လျှပ်စီးကြောင်းကြောင့် ဖြစ်ပေါ်လာသော ပါဝါဆုံးရှုံးမှုကို ရှောင်ရှားနိုင်ပြီး ကွိုင်၏အပူကို လျှော့ချနိုင်သည်။
၂) ဟိုက်ဘရစ်သံလိုက်ဝင်ရိုး၏ လျှပ်စစ်သံလိုက်အတွက် လိုအပ်သော လှည့်အရေအတွက်သည် တက်ကြွသောသံလိုက်ဝင်ရိုးထက် များစွာသေးငယ်ပြီး သံလိုက်ဝင်ရိုး၏ ပမာဏကို လျှော့ချရန်နှင့် ပစ္စည်းများကို ချွေတာရန်အတွက် အထောက်အကူဖြစ်စေသည်။ ဤဝင်ရိုးအမျိုးအစားသည် အရွယ်အစားသေးငယ်ခြင်း၊ အလေးချိန်ပေါ့ပါးခြင်းနှင့် မြင့်မားသောစွမ်းဆောင်ရည်တို့၏ အားသာချက်များရှိပြီး အရွယ်အစားသေးငယ်ခြင်းနှင့် အရွယ်အစားသေးငယ်သော အသုံးချမှုများအတွက် သင့်လျော်သည်။
ပို့စ်တင်ချိန်: ၂၀၂၅ ခုနှစ်၊ ဖေဖော်ဝါရီလ ၁၉ ရက်



